


For decades, hardware defined what a vehicle could do. Today, software is playing a more pivotal role — driving how commercial vehicles operate and evolve over time.
This is the shift to software‑defined vehicles: where hardware and software are designed together, over-the-air (OTA) updates replace factory‑locked features, and vehicles continue to improve long after they’re deployed.
It’s the co-development of hardware and software that truly unlocks potential. Hardware decisions made well before start of production define what’s possible throughout a commercial vehicle’s entire lifecycle, including:
- How long it remains productive
- How easily it adapts to new regulations and customer demands
- How much downtime fleets experience over decades, not just years
Enabled by this critical high-power compute hardware, advanced software is revolutionizing commercial vehicle design, performance and ownership.
Software-defined Architecture is the Foundation of Commercial Vehicle Innovation
Software‑defined architectures, also referred to as centralized vehicle architectures, emerged in commercial vehicles alongside passenger vehicles. They progressed for different reasons and on different timelines.
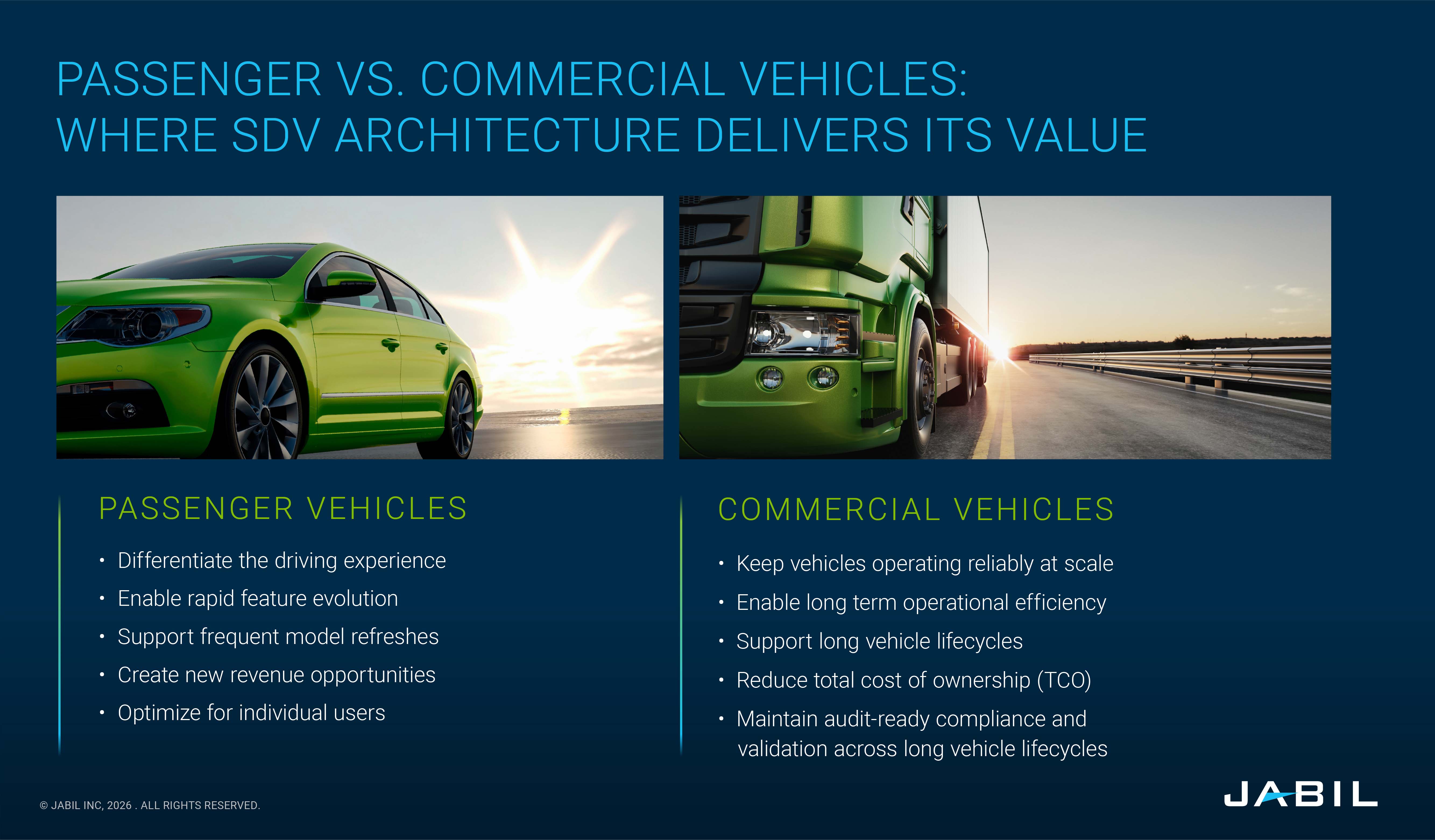
In passenger vehicles, software-defined vehicle (SDV) architectures are often used to enhance features such as digital cockpits and connected services, shaping the user experience.
Commercial vehicles — including trucks, buses, and specialized on‑road platforms — use SDV architectures to support reliable, efficient operation at scale. Designed for continuous use over long lifecycles, these vehicles depend on early architectural choices that directly shape uptime, safety, and operational performance.
Placing software at the core of these architectures changes how that performance is managed over time. Fleet operations become more efficient, maintenance more predictive, and energy use continuously optimized. Driver assistance and automation capabilities can also advance incrementally, guided by real‑world operation rather than fixed launch timelines.
That same software‑centric foundation delivers long‑term value for manufacturers. Vehicles can remain relevant and differentiated well after production begins, adapting to changing customer expectations, regulatory requirements, and business models across extended lifecycles.
Zonal and centralized compute architectures are a key enabler of this approach. By consolidating electronic control units into fewer, more capable controllers, OEMs gain system‑level visibility and control — making software‑driven optimization and lifecycle adaptability possible at scale.
Software Reshapes Vehicle Health and Maximize Uptime
Every hour a commercial vehicle remains in operation improves productivity and overall asset value. For OEMs, this reality changes how vehicle platforms must be designed. Uptime becomes a core architectural priority rather than a downstream outcome.
Software‑defined architectures make uptime something that can be actively managed. Built on zonal and centralized compute platforms, these architectures provide continuous visibility into how vehicle systems perform in real‑world duty cycles. That visibility creates the foundation for modern health management.
Connected diagnostics form the first layer. At this level, software continuously monitors system behavior across vehicle domains. It identifies emerging issues and active faults. It also assesses their potential impact and delivers actionable insights to fleet and service systems. The goal is clarity about what is happening now, instead of discovering problems only after a vehicle reaches a service location.
Systems such as Cummins’ Connected Diagnostics show how this works in practice. Early architectural decisions like centralized compute, standardized interfaces, and retained software ownership make real‑time health visibility possible at scale. These platforms do not predict future failures. They provide a clear picture of current vehicle condition so operators can mitigate potential issues before they impact uptime, cost, or service schedules.
AI‑driven anomaly detection builds on that visibility. Here, AI refers to software models that analyze large volumes of vehicle data to identify patterns that fixed limits cannot detect. Examples include gradual temperature drift, current imbalance, or increasing response latency. These signals often appear well before a fault code is triggered.
Instead of reacting after a shutdown, maintenance teams can see abnormal behavior weeks earlier. Vehicles can be scheduled for service during planned windows. Technicians enter the shop with clearer context. Parts can be staged in advance, and some calibrations may be handled remotely.
Predictive maintenance represents the third layer. At this stage, models analyze trends across sensors, controllers, and power electronics over time. The objective is to identify components that are likely to require attention soon, rather than waiting for a failure to occur. Maintenance planning shifts from reactive response to proactive preparation.
Working together, these layers change how vehicle health is managed; connected diagnostics and AI anomaly detection generate the visibility and behavioral signals that predictive maintenance relies on. Diagnostics then move from isolated fault detection to continuous system oversight. Vehicles spend less time out of service. Unplanned repairs decrease. Commercial platforms deliver greater value across their full operational life.
Every additional day of uptime delivers measurable economic value — helping fleets avoid hundreds to thousands of dollars in lost productivity while improving overall asset utilization.
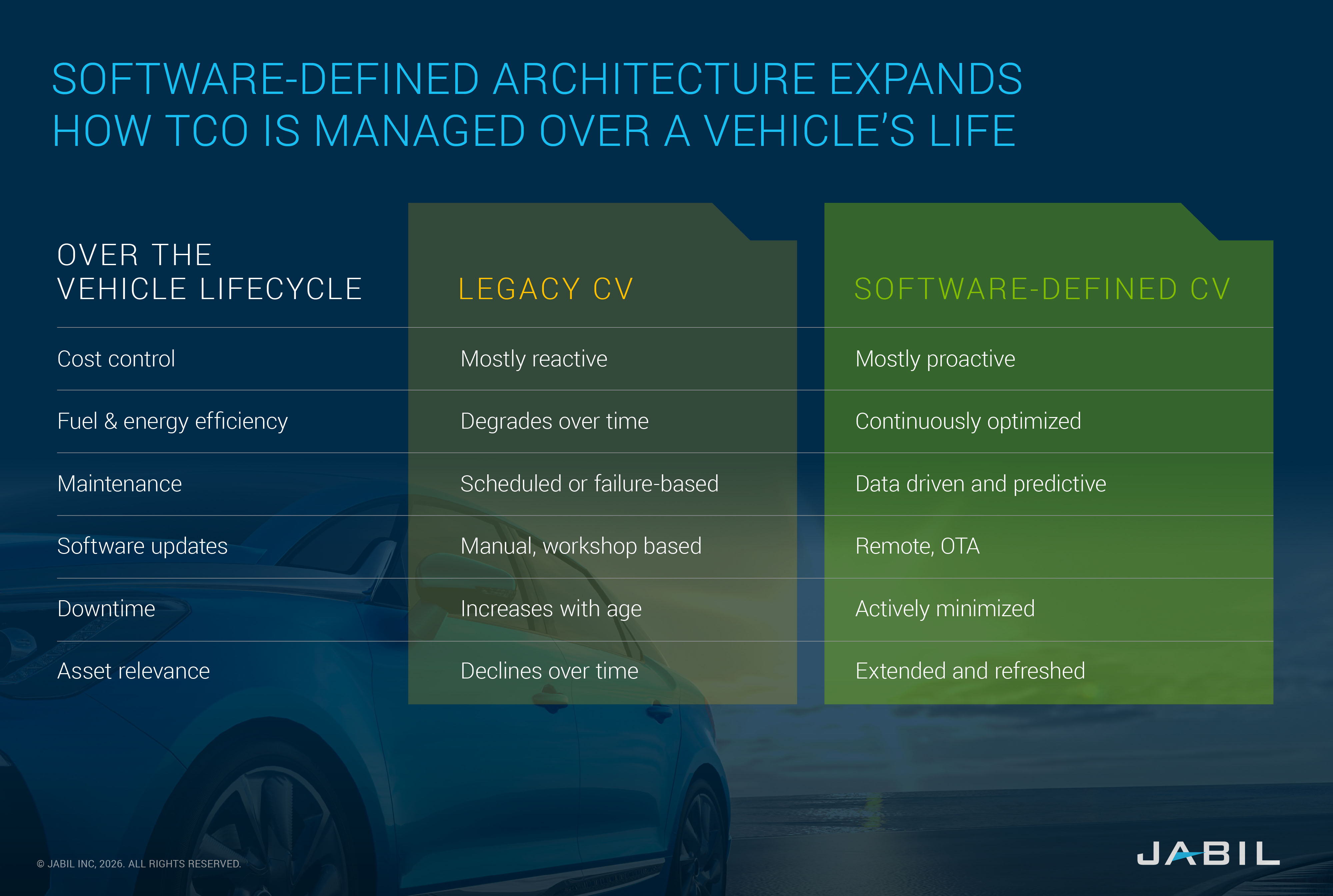
Software-Defined Architectures Shape Lifetime Costs
Commercial vehicles are long-lived, revenue-generating assets. Their lifetime cost is driven by how consistently they perform, how efficiently they use energy, and how easily they adapt to real operating conditions. As a result, total cost of ownership is increasingly shaped by software, not just by the initial hardware build.
For internal combustion platforms, software plays a growing role in managing fuel consumption and component stress — two of the largest drivers of lifetime cost. PACCAR’s Driver Performance Assistant shows how software translates design intent into daily operation. Real-time analysis of driving behavior enables in-cab coaching that improves fuel efficiency and reduces brake and drivetrain wear over long duty cycles.
Software-defined architectures also allow vehicles to improve over time without repeated visits to the workshop. Daimler Truck’s over-the-air update capabilities demonstrate how software can be deployed remotely while vehicles are stationary. This reduces the need for physical service interventions and limits operational disruption.
Over the full service life, these capabilities help control cost accumulation. OEMs can deploy efficiency improvements, safety enhancements, and automation-ready features through software without redesigning underlying hardware. Vehicles remain relevant longer. Performance stays consistent year after year. Asset value is preserved as operating conditions change.
In this model, lifetime cost becomes more predictable. Vehicles are better able to absorb change, reduce unnecessary service events, and operate closer to their intended design performance throughout long duty cycles.
Electrified Powertrains Sustain Performance Over Years of Service
Centralized vehicle architecture also fundamentally changes how powertrains are designed and managed. Rather than relying on fixed, launch‑day calibration, powertrain performance can evolve through software as real‑world operating conditions change.
By centralizing control of propulsion, energy, and thermal systems, OEMs move beyond component‑level optimization. Software balances these functions together, allowing the powertrain to adapt to actual vehicle use and maintain performance throughout its lifecycle.
The Volvo VNR Electric illustrates this approach. Its connected software continuously analyzes battery and thermal conditions and adjusts performance in real time. This helps stabilize range, maintain reliability, and support predictable operating costs across years of service.
Commercial duty cycles are inherently variable. Designing for an “average” use case is rarely sufficient. SDV architecture allows one electrified powertrain platform to support multiple duty profiles without extra hardware margin that increases cost and wear.
The economic stakes of that powertrain flexibility concentrate in the battery.
In commercial electric vehicles (EVs), batteries often represent 30–40% of total vehicle cost, and their degradation directly impacts uptime, warranty exposure, and residual value. Peak range matters far less than controlled degradation and predictable performance over years of service.
By managing energy flow and thermal limits at a system level, centralized architecture enables batteries to be protected differently across various commercial operating scenarios, including:
- High payloads and stop‑and‑go duty cycles
- Cold‑weather operation
- Hot climates
- Sustained high loads
- Variable auxiliary loads (HVAC, PTOs, refrigeration, hydraulics)
- Aging batteries and high‑mileage vehicles
Predictable Vehicle Behavior Becomes the New Foundation of Safety
Safety has always been a core design requirement in commercial vehicles, driven by regulations and operational responsibility. What changes in a software‑defined architecture is not the goal of safety, but how it is achieved and sustained. Safety protocols are evolving from isolated protections to connected and coordinated systems.
ASIL‑qualified software manages braking, steering, stability, and powertrain behavior together, replacing the fragmented approaches used in legacy designs and improving predictability in real‑world operation.
This kind of coordination shows up most clearly during high‑stress events. For example, during an emergency braking scenario on a fully loaded tractor‑trailer, SDV architecture allows braking, torque reduction, stability control, and ADAS functions to act together. Instead of competing interventions, the vehicle delivers a predictable, unified response that maintains control and reduces stopping distance variability.
That same architectural foundation also improves how vehicles behave when something goes wrong internally. Rather than sudden feature loss, SDV enables defined degraded operating modes that prioritize safe continuation of service. A truck experiencing a subsystem fault can automatically adjust power limits, braking behavior, and driver alerts in a controlled way — maintaining safe operation over long distances until service is possible. For long‑haul and vocational fleets, this predictability is often more important than peak capability.
In commercial vehicles, cybersecurity is now a core safety requirement. As trucks operate as connected assets within fleet systems, protecting the integrity of vehicle control becomes essential to safe operation. Software‑defined architecture embeds cybersecurity directly into the compute and control layers that govern vehicle behavior. Rather than treating security as an add‑on, SDV platforms protect how the vehicle responds in real-time through:
- Separation of safety‑critical control from non‑critical software
- Trusted communication paths within the vehicle
- Ongoing software integrity checks
Software‑defined architecture helps contain the risk of cyber-attacks by isolating vehicle control from external systems, reducing the likelihood that a backend or telematics breach can influence how a truck accelerates, steers, or stops. This system-level reliability helps mitigate risk to keep vehicles on the road and costs in control over a lifetime.
Commercial Vehicle OEMs Build Long Term Advantage with Software-Defined Architectures
Success in an SDV‑driven commercial vehicle market depends less on any single architectural decision and more on a shift in mindset. Leading OEMs are designing vehicle programs around software and platform strategy from the outset, rather than treating software as a downstream concern.
This approach creates consistency in the electrical and electronic (E/E) architecture, which is the computing, power, sensors, and networks that connect vehicle systems across multiple vehicle lines. That consistency reduces fragmentation, keeps cost and complexity under control, and helps new capabilities reach production faster. It also enables hardware and software to be developed in parallel, so platforms can adapt as operating conditions, regulations, and customer expectations evolve.
Just as important, the SDV era is redefining how OEMs collaborate. The most resilient program strategies are built on partnerships that combine software expertise, compute platforms, system integration, and manufacturing scale. In this model, partners play a critical role in helping OEMs industrialize software-defined platforms, manage risk, and accelerate time to value, without locking innovation into rigid, tightly coupled solutions.
As commercial vehicles become software‑defined, OEMs that adopt SDV as a long‑term platform strategy will be best positioned to lower TCO, respond faster, and deliver vehicles that improve over time.
How can Jabil help you meet your commercial vehicle goals? Contact us.
No matter how complex or demanding the project, Jabil's automotive and transportation team is helping today’s innovators solve it. Get started with a trusted partner.